首页
模型库
会员风采
资讯热点
图 纸
图 纸
工程师
资讯热点
我要上传
登录注册
当前位置:
模型库
> 机器人模型
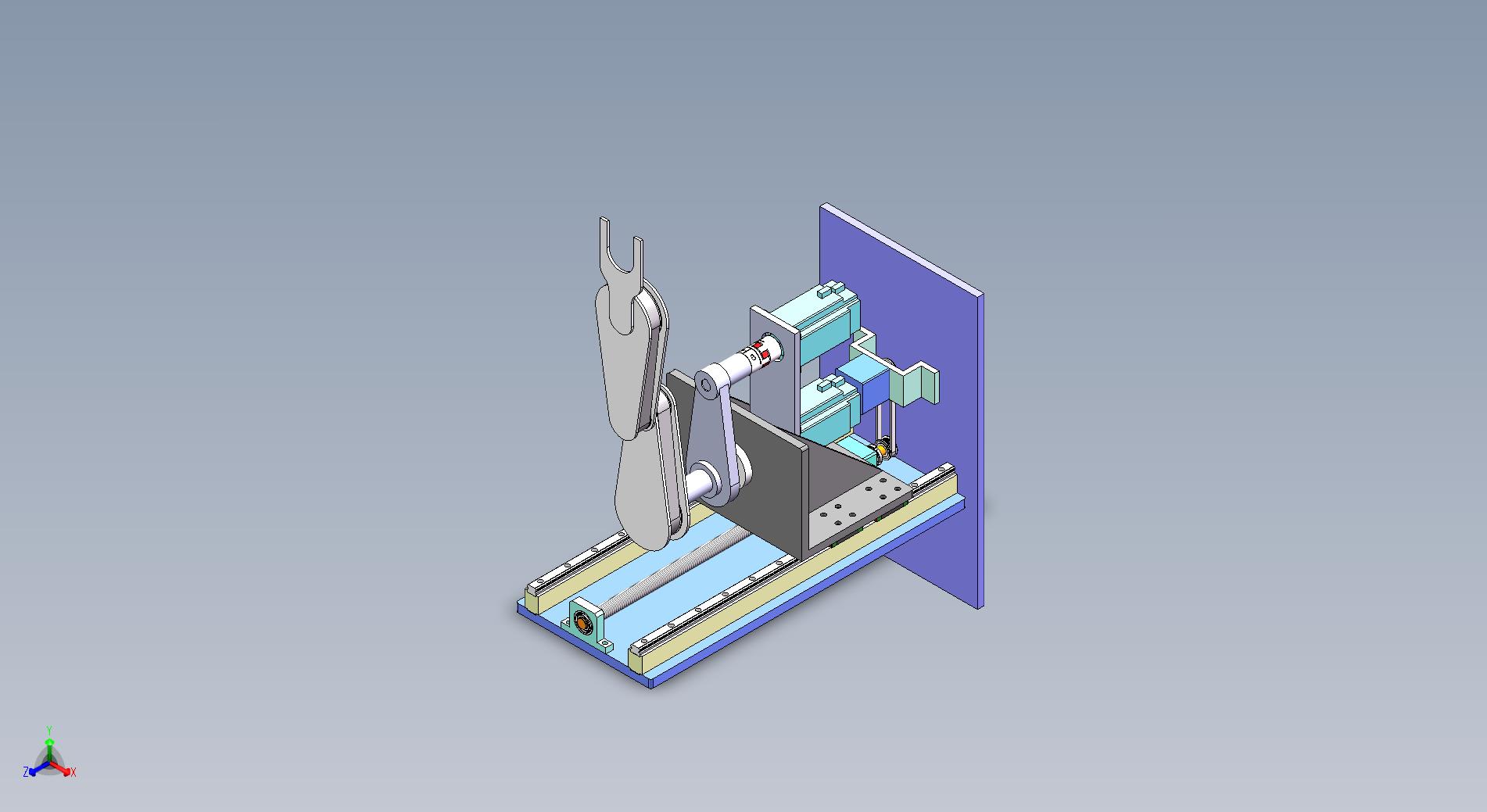
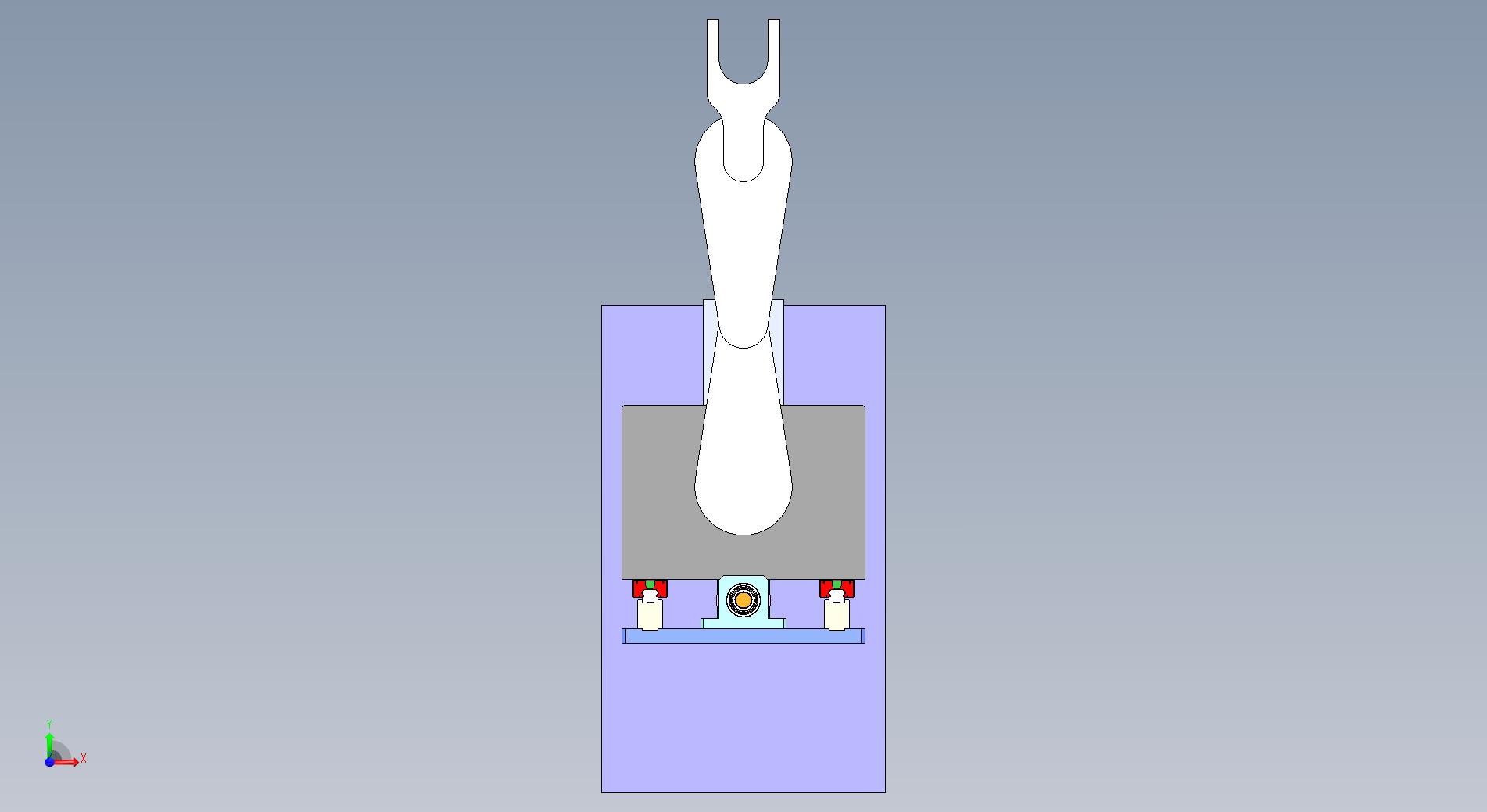
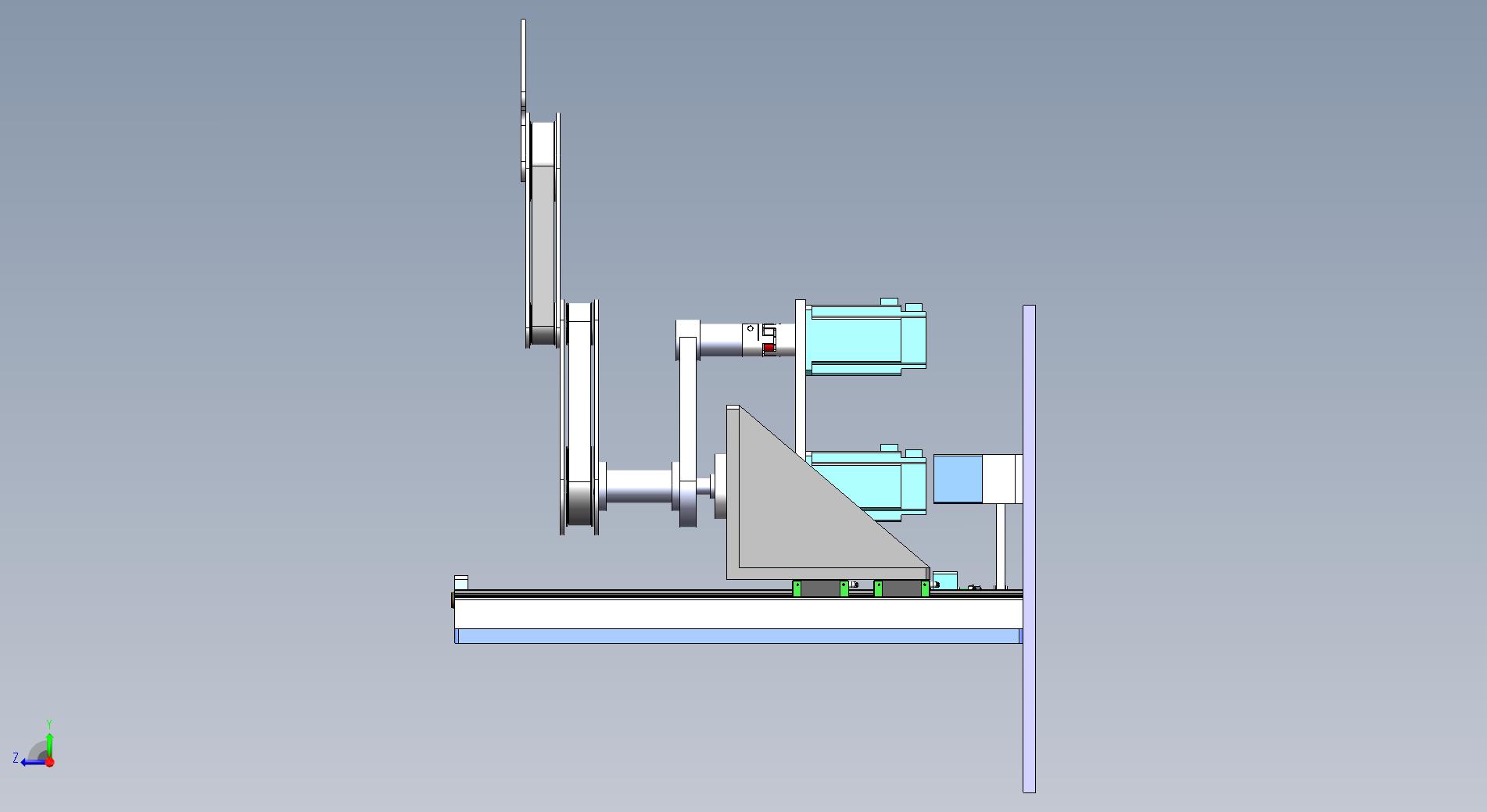
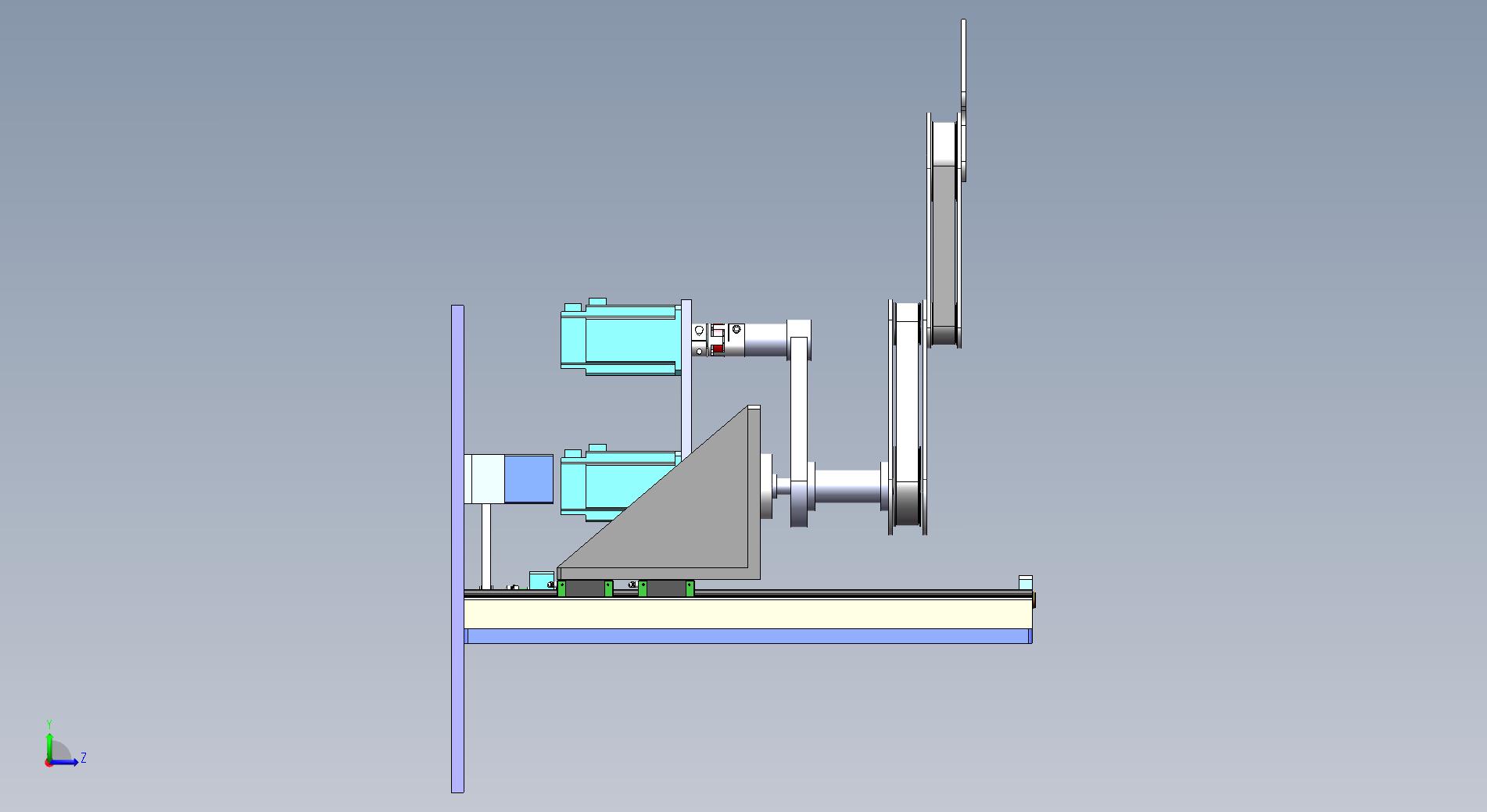
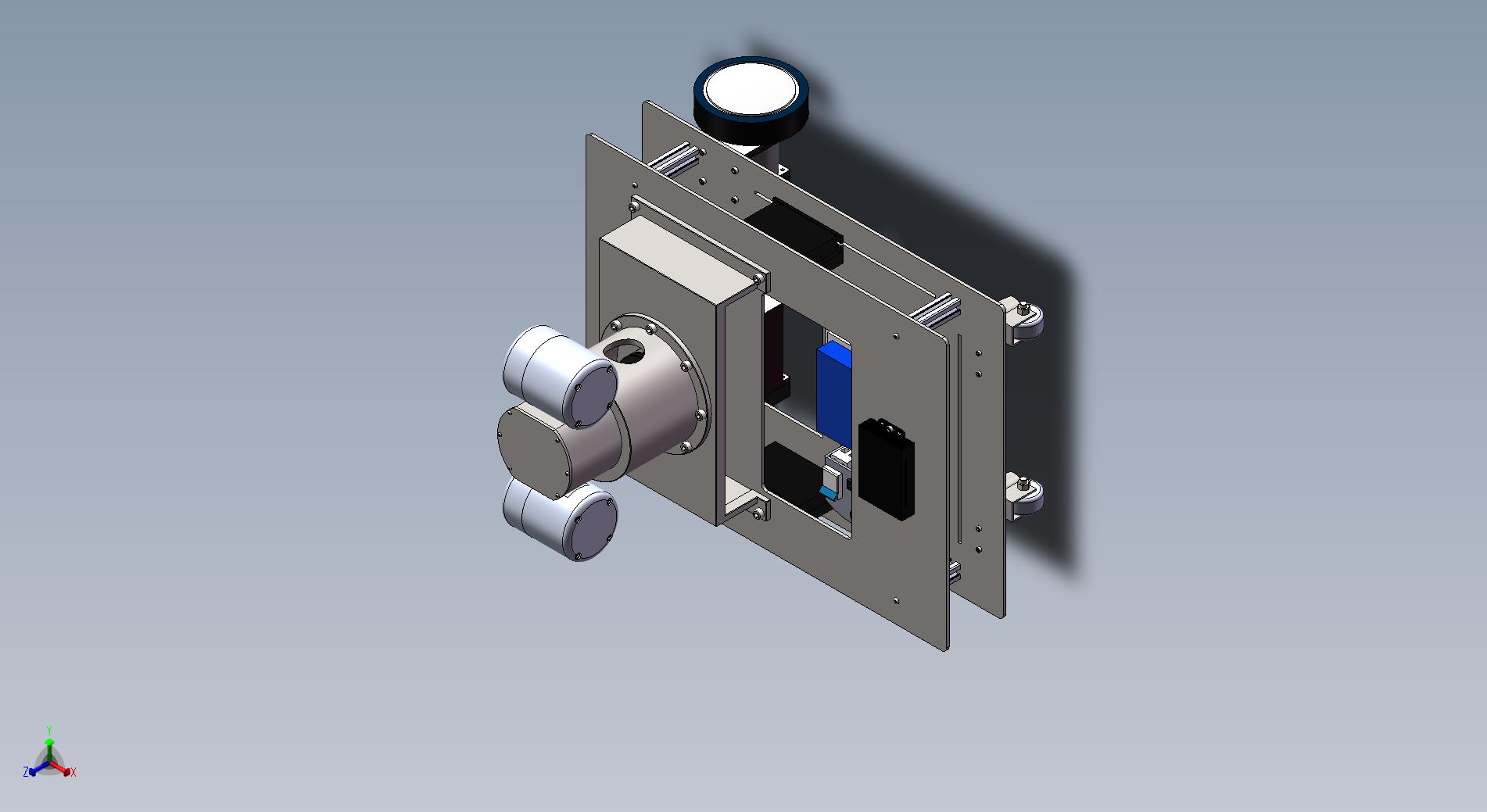
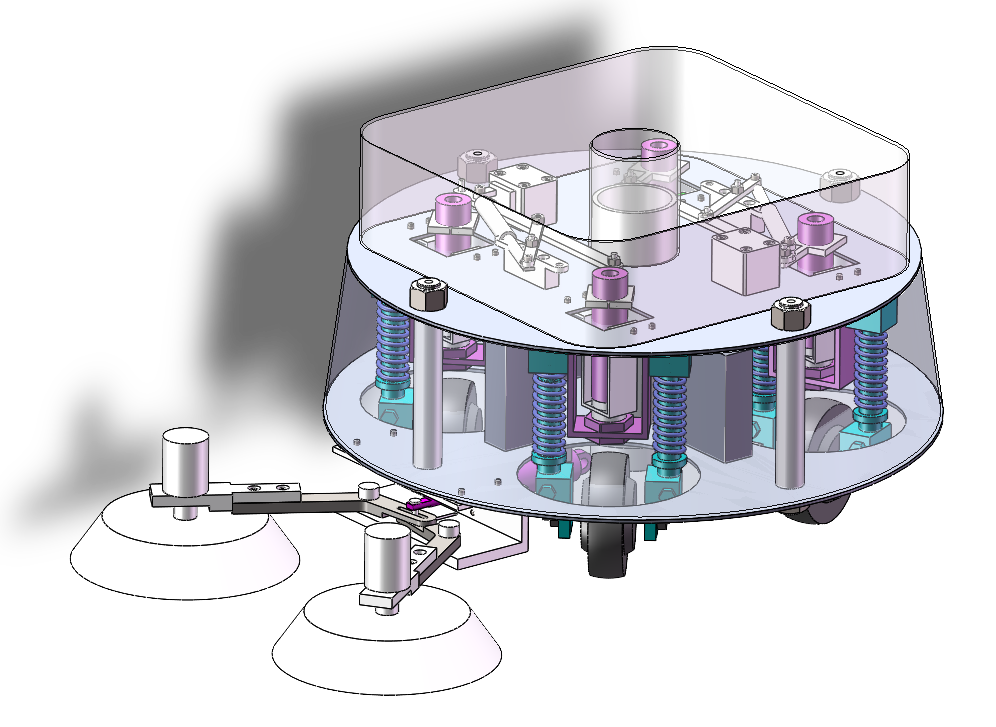
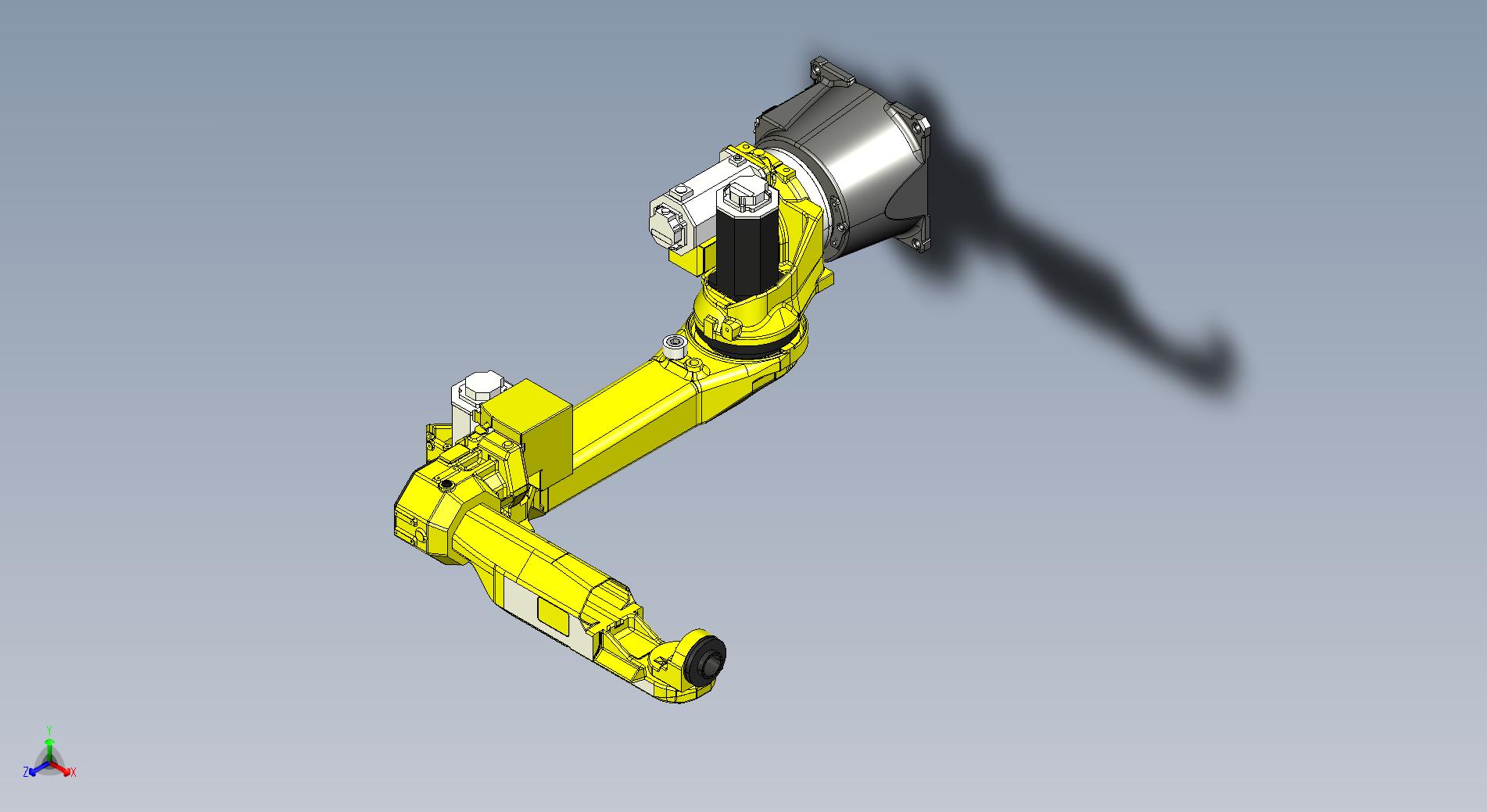
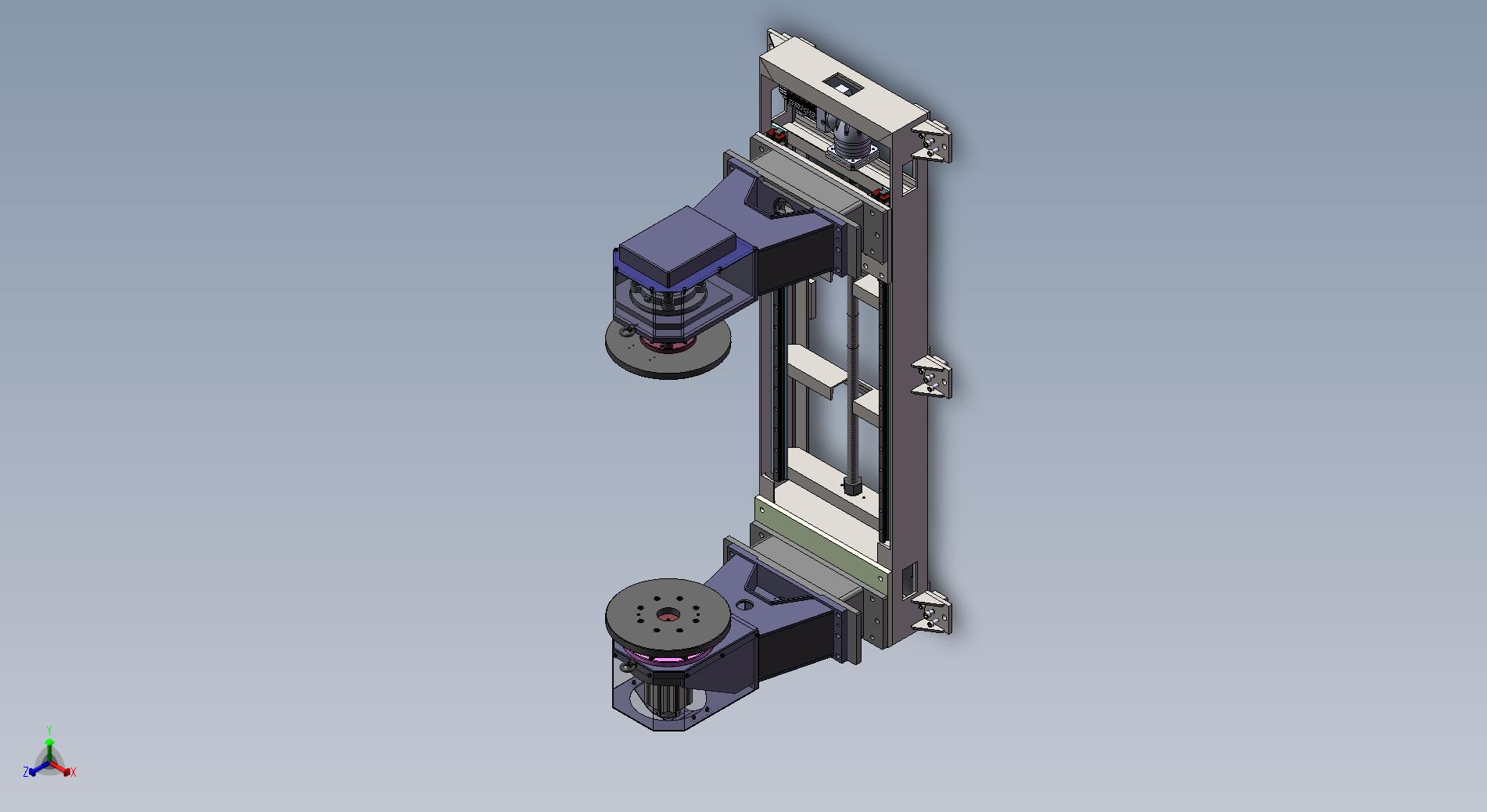
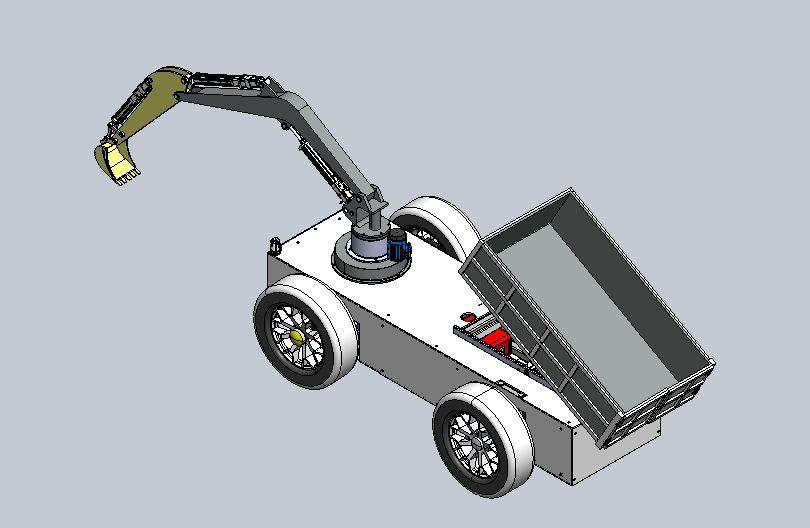
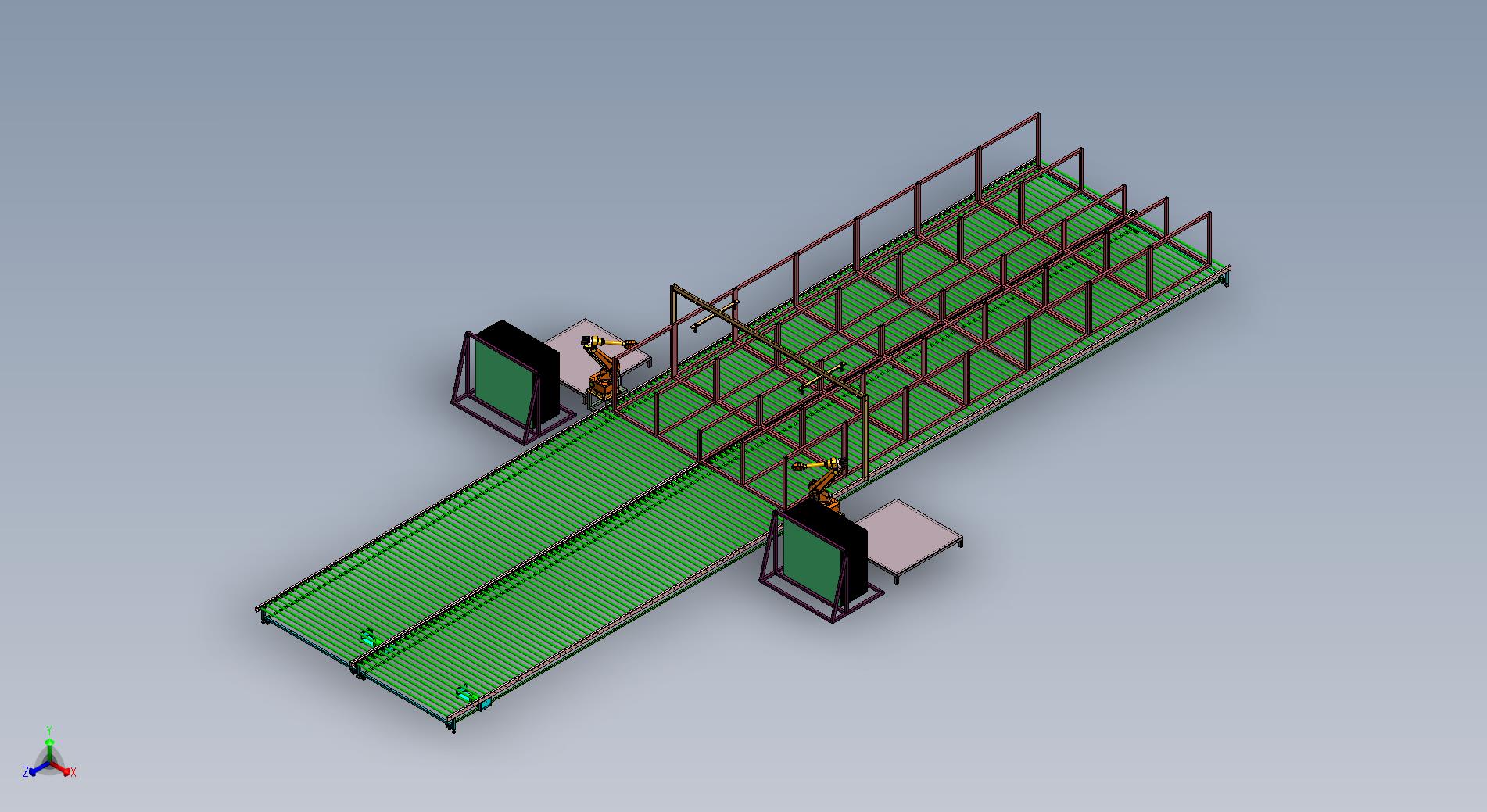
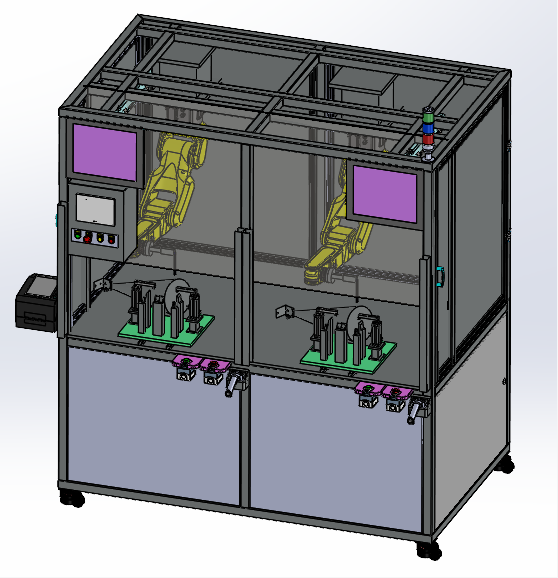
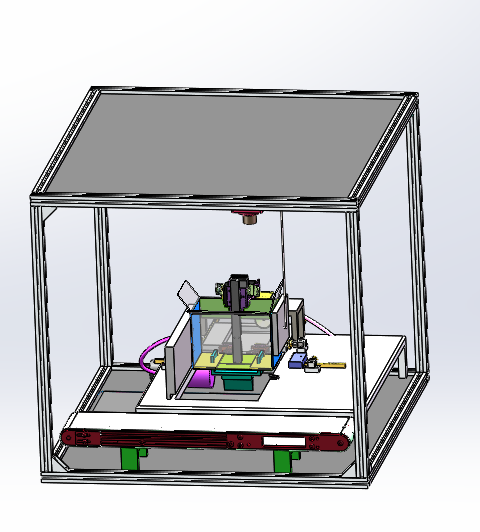
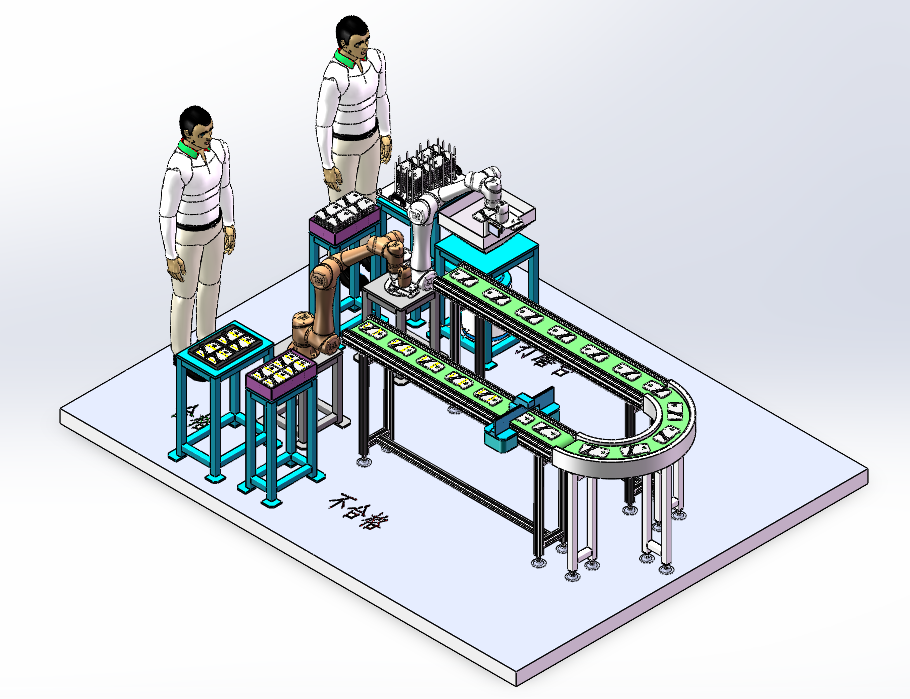
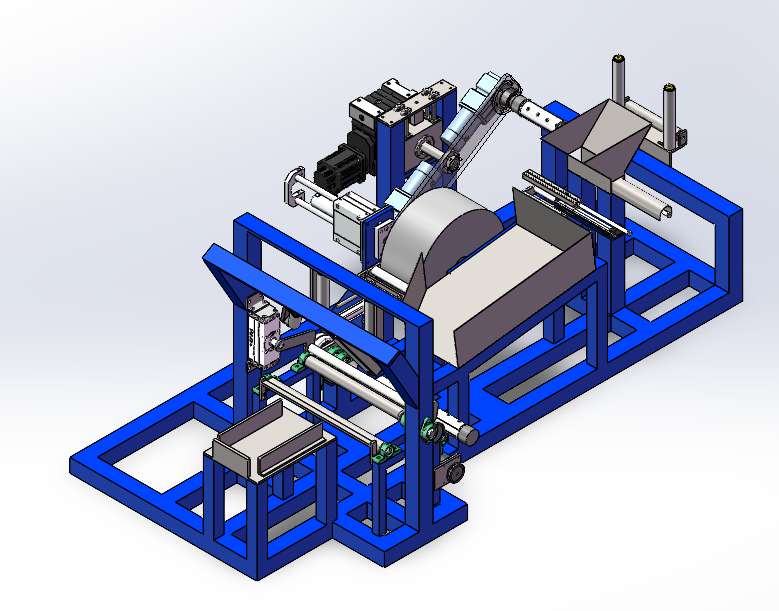
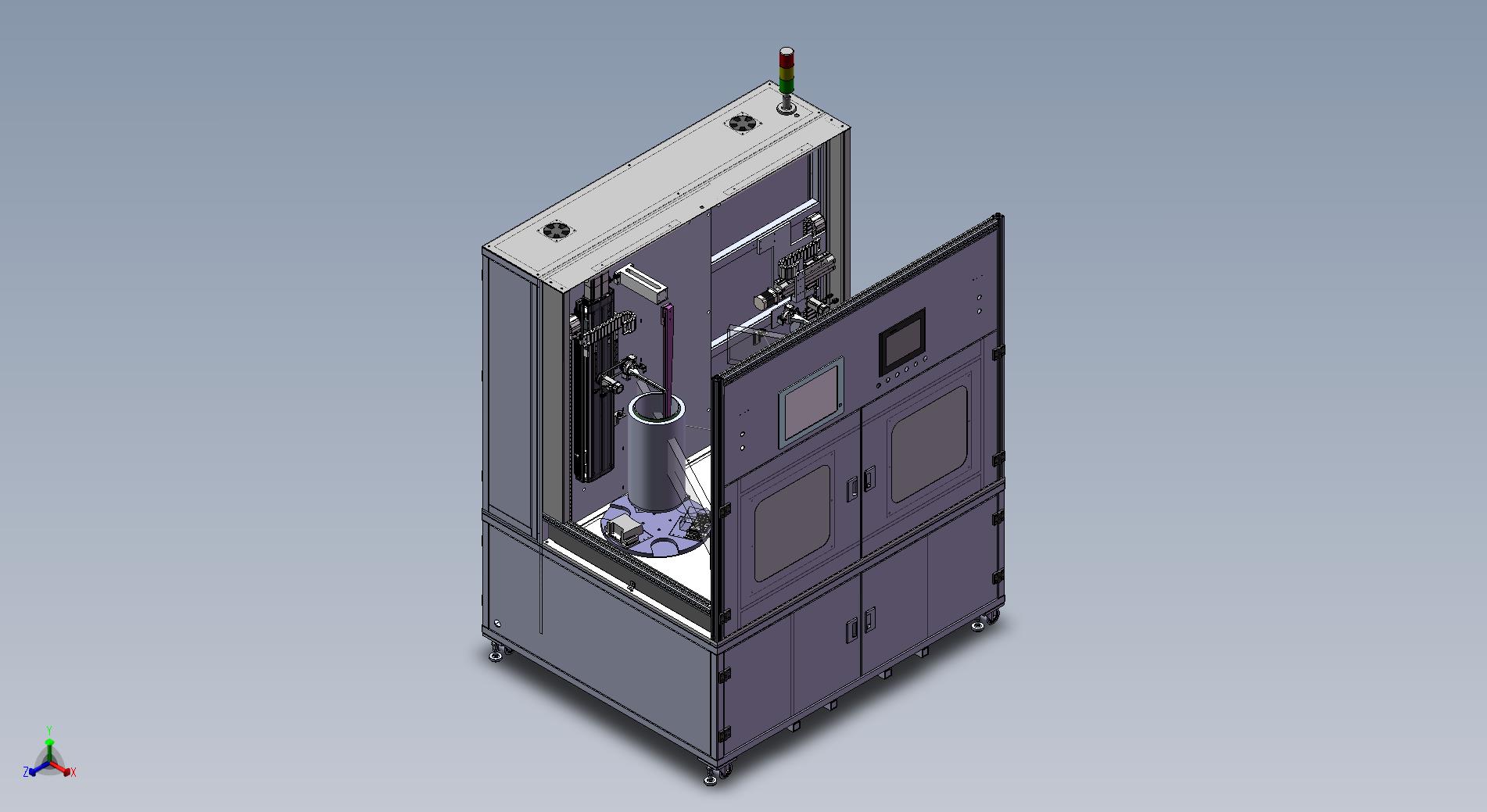
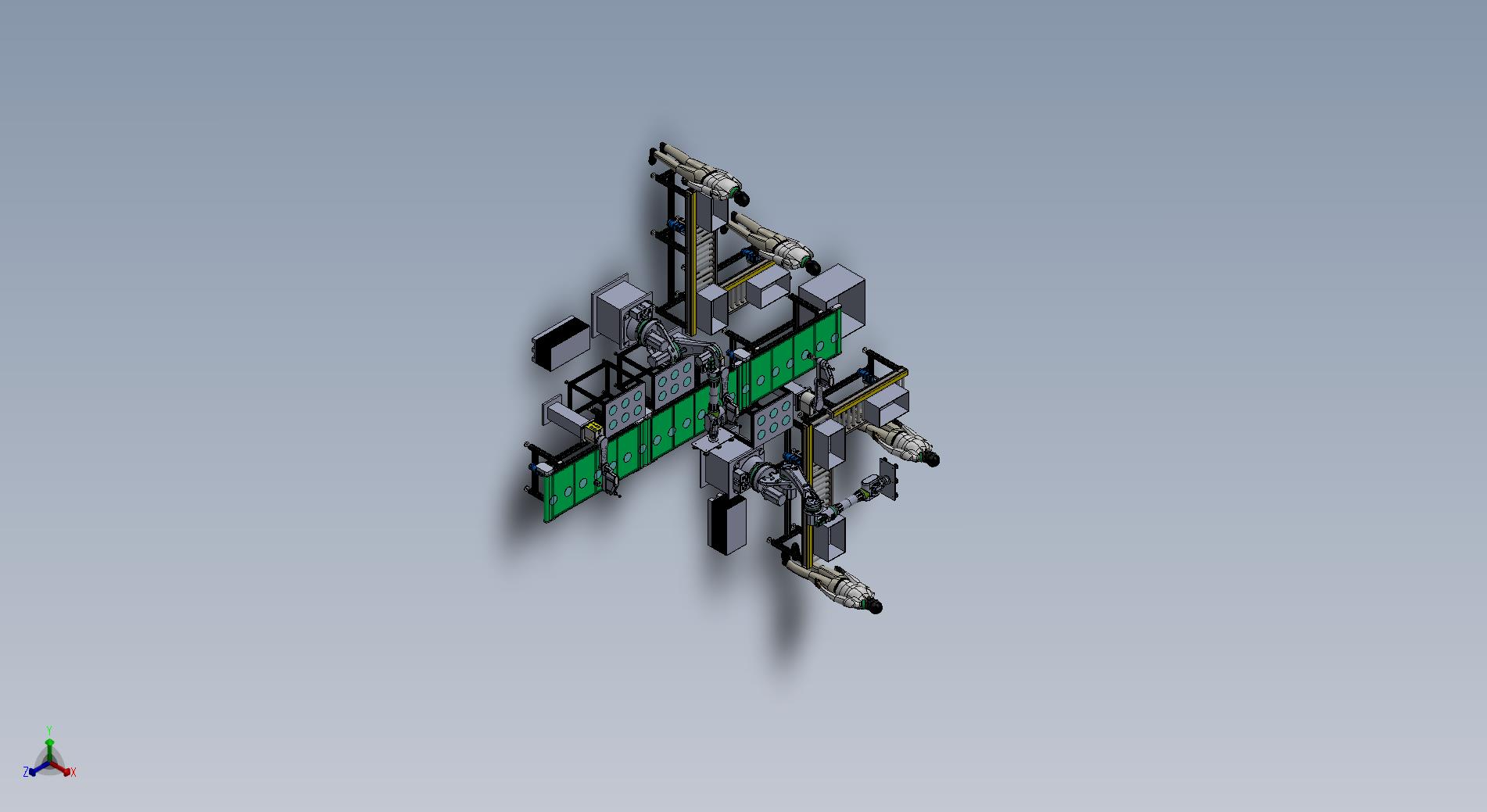
R-θ机器人设计
平面图
3D视图
文件列表
0
0
0
分享
举报
相关模型
智能巡检机器人
沪上飘飞
0
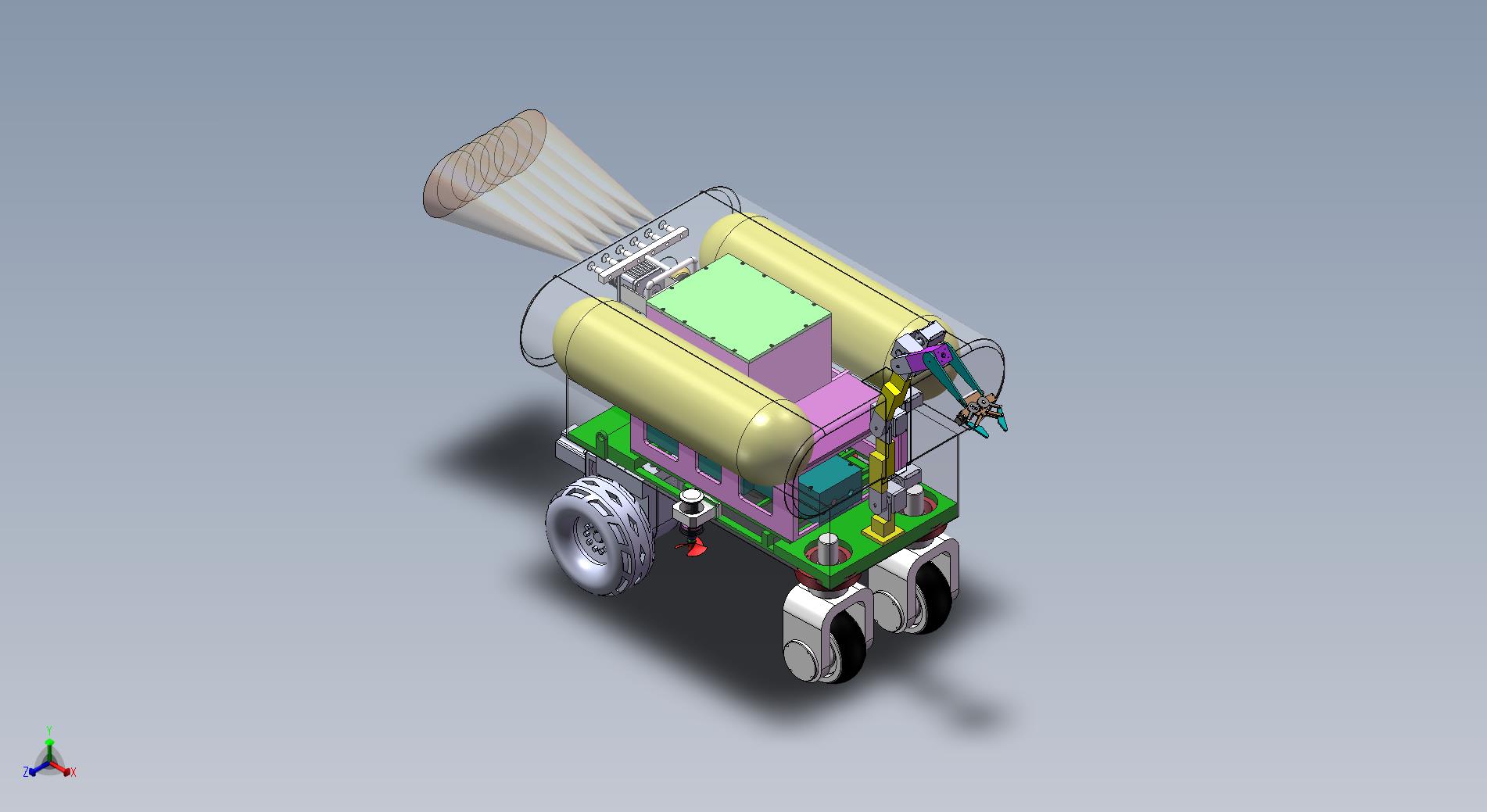
多功能水下采集机器人
雨晨风雪
0
清扫机器人
吉祥2025
0
FANUC机器人,M-20iA模型
机械大师兄
0
机器人焊接变位机
赤橙资料室
0
开矿搬运机器人
沪上飘飞
0
机器人玻璃上料机三维模型
雨晨风雪
0
协作机器人检测站
赤橙资料室
0
雨晨风雪
加入时间: 2024-11-26
关注
私信
作品:
1921
粉丝:
1
下载图纸
图纸参数
图纸格式:
step,
sldprt,
stp,
sldasm,
dwg
软件版本:
SolidWorks 2020,
STP/STEP
大小:
21.83 MB
上传时间:
2025-06-08 20:50:14
所需积分:
18
初程币
是否可编辑:
可修改,包括参数
行业分类:
机器人模型
机器人
设计
图纸描述
暂无图纸描述
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其他图纸
客服
微信咨询
QQ1:547916602
QQ2:1405905813
工作时间:8:30-20:30
交流群
投稿
返回顶部
图 纸
图 纸
工程师





白图f698934a6ae8beb6f90a56ba8b46f43cd10b8820.png)